 /GY-NEO6MV2 ESP32.ino
/GY-NEO6MV2 ESP32.ino
Last active Nov 27, 2019
| /* | |
| (c) 2019 by shopofthings.ch | |
| Beispiel zum Verbinden des GPS Modules mit | |
| einem ESP32 Modul | |
| Pinverbindung: | |
| ESP 3.3V > GPS VCC | |
| ESP GND > GPS GND | |
| ESP RX > GPS TX | |
| ESP TX > GPS RX | |
| Achtung: RX wird mit TX bzw. TX mit RX verbunden! | |
| Das GPS Modul hat eine blaue LED. Diese blinkt, wenn Satelliten erreichbar sind. Sind | |
| keine Satelliten im Sichtfeld, bleibt sie dunkel. Ein Zustand, wo sie immer leuchtet | |
| gibt es nicht. | |
| Troubleshooting: | |
| - Arduino IDE gibt bei Upload Fehler aus: Boot Taste vor dem Upload gedrückt halten, bis Upload beginnt. | |
| - | |
| */ | |
| #include <TinyGPS++.h> // Library über http://arduiniana.org/libraries/tinygpsplus/ downloaden und installieren | |
| #include <HardwareSerial.h> // sollte bereits mit Arduino IDE installiert sein | |
| #include "EEPROM.h" // sollte bereits mit Arduino IDE installiert sein | |
| /* | |
| mit EEPROM können Daten zwischengespeichert werden, | |
| ein kleiner Speicher sozusagen. Daten sind auch nach einem | |
| Reset noch da, wo sie hingeschrieben wurden. Um in den | |
| Speicher schreiben zu können, muss eine Speichergrösse | |
| angegeben werden. Diese wird in Bytes angegeben. | |
| Wir verwenden diese, um den letzten GPS-Fix abzuspeichern | |
| damit er beim neustart als erstes eingelesen wird. Damit | |
| wird verhindert, dass z.B. bei einer Aufnahme unsere Position | |
| als erstes auf den 0,0 Punkt springt, der irgendwo im Atlantischen | |
| Ozean liegt. | |
| Der Speicher bei ESP32 kann zwischen 4 und maximum 1984 bytes liegen | |
| */ | |
| #define EEPROM_SIZE 128 | |
| /* | |
| Als nächstes wird das Programmobjekt für das GPS erstellt, wir nennen | |
| die Variable die darauf zeigt einfach "gps" | |
| */ | |
| TinyGPSPlus gps; | |
| /* | |
| Nun müssen wir eine serielle Verbindung zum GPS Modul erstellen | |
| ESP32 unterstützt bis zu 3 Hardware Serielle Verbndungen. Deshalb | |
| müssen wir auch nicht die Softwareserial-Library verwenden. | |
| Die Zahl in der Klammer ist die uart_nr. Damit werden die drei möglichen | |
| Verbindungen unterschieden. Für ESP32 kann dieser Wert also 0, 1 oder 2 sein | |
| */ | |
| HardwareSerial SerialGPS(1); | |
| /* | |
| Als nächstes erstellen wir ein Template-Object, wo wir die ganzen Daten | |
| in einer Variable abspeichern können, die vom GPS Modul gelesen werden | |
| Im Anschluss erstellen wir gleich so eine neue Variable, "gpsState" | |
| */ | |
| struct GpsDataState_t { | |
| double originLat = 0; | |
| double originLon = 0; | |
| double originAlt = 0; | |
| double distMax = 0; | |
| double dist = 0; | |
| double altMax = -999999; | |
| double altMin = 999999; | |
| double spdMax = 0; | |
| double prevDist = 0; | |
| }; | |
| GpsDataState_t gpsState = {}; | |
| /* | |
| Mit der nachfolgenden Konstante definieren wir die Ausgabegeschwindigkeit | |
| im Serial Monitor. Diese wird in Millisekunden angegeben. | |
| Darunter die dazugehörigen Variablen, um diese Beschränkung zu erreichen | |
| */ | |
| #define TASK_SERIAL_RATE 1000 // ms | |
| uint32_t nextSerialTaskTs = 0; | |
| uint32_t nextOledTaskTs = 0; | |
| /* | |
| Setup Funktion. | |
| Diese wird einmal beim Systemstart ausgeführt | |
| Enthält alle Initialisierungen | |
| */ | |
| void setup() { | |
| // Serial ist die Ausgabe im Serial Monitor | |
| Serial.begin(115200); | |
| /* | |
| Die Verbindung mit dem GPS Modul. Wir | |
| void begin(unsigned long baud, uint32_t config=SERIAL_8N1, int8_t rxPin=-1, int8_t txPin=-1, bool invert=false, unsigned long timeout_ms = 20000UL); | |
| baud: baudrate gemäss Spzifikation des GPS Moduls, in diesem Fall 9600 | |
| config: default Wert | |
| rxPin: ein RX-Pin z.B. 16 | |
| txPin: ein RX-Pin z.B. 17 | |
| */ | |
| SerialGPS.begin(9600, SERIAL_8N1, 16, 17); | |
| /* | |
| EEPROM Speicher initialisieren, wenn noch nicht existent | |
| */ | |
| while (!EEPROM.begin(EEPROM_SIZE)) { | |
| true; | |
| } | |
| /* | |
| Die drei Achsrichtungen x, y, z aus dem Speicher | |
| lesen und hinterlegen | |
| */ | |
| long readValue; | |
| EEPROM_readAnything(0, readValue); | |
| gpsState.originLat = (double)readValue / 1000000; | |
| EEPROM_readAnything(4, readValue); | |
| gpsState.originLon = (double)readValue / 1000000; | |
| EEPROM_readAnything(8, readValue); | |
| gpsState.originAlt = (double)readValue / 1000000; | |
| } | |
| /* | |
| Hilfsfunktionen um vereinfacht Speicher zu lesen und schreiben | |
| */ | |
| template <class T> int EEPROM_writeAnything(int ee, const T& value) | |
| { | |
| const byte* p = (const byte*)(const void*)&value; | |
| int i; | |
| for (i = 0; i < sizeof(value); i++) | |
| EEPROM.write(ee++, *p++); | |
| return i; | |
| } | |
| template <class T> int EEPROM_readAnything(int ee, T& value) | |
| { | |
| byte* p = (byte*)(void*)&value; | |
| int i; | |
| for (i = 0; i < sizeof(value); i++) | |
| *p++ = EEPROM.read(ee++); | |
| return i; | |
| } | |
| /* | |
| Loop Funktion | |
| Diese wird bei jedem Systemtakt ausgeführt | |
| */ | |
| void loop() { | |
| static int p0 = 0; | |
| // GPS Koordinaten von Modul lesen | |
| gpsState.originLat = gps.location.lat(); | |
| gpsState.originLon = gps.location.lng(); | |
| gpsState.originAlt = gps.altitude.meters(); | |
| // Aktuelle Position in nichtflüchtigen ESP32-Speicher schreiben | |
| long writeValue; | |
| writeValue = gpsState.originLat * 1000000; | |
| EEPROM_writeAnything(0, writeValue); | |
| writeValue = gpsState.originLon * 1000000; | |
| EEPROM_writeAnything(4, writeValue); | |
| writeValue = gpsState.originAlt * 1000000; | |
| EEPROM_writeAnything(8, writeValue); | |
| EEPROM.commit(); // erst mit commit() werden die Daten geschrieben | |
| gpsState.distMax = 0; | |
| gpsState.altMax = -999999; | |
| gpsState.spdMax = 0; | |
| gpsState.altMin = 999999; | |
| /* | |
| * Rohdaten von Serieller Verbndung zum GPS-Modul | |
| * einlesen. Die Daten werden mittels TinyGPS++ verarbeitet | |
| * Die Daten werden bewusst erst nach der Zuweisung der Variablen | |
| * gelesen, damit wir noch im nachfolgenden vereinfacht | |
| * Berechnungen anstellen können. | |
| */ | |
| while (SerialGPS.available() > 0) { | |
| gps.encode(SerialGPS.read()); | |
| } | |
| /* | |
| * Diverse Berechnungen von Maximum und Minimum-Werten und zurückgelegter Distanz | |
| * Diese werden aber erst gemacht, wenn mindestens ein Fix mit 4 Satelliten vorhanden | |
| * ist, allenfalls wäre die Genauigkeit nicht gegeben und es würden falsche | |
| * Werte berechnet werden. | |
| */ | |
| if (gps.satellites.value() > 4) { | |
| gpsState.dist = TinyGPSPlus::distanceBetween(gps.location.lat(), gps.location.lng(), gpsState.originLat, gpsState.originLon); | |
| if (gpsState.dist > gpsState.distMax && abs(gpsState.prevDist - gpsState.dist) < 50) { | |
| gpsState.distMax = gpsState.dist; | |
| } | |
| gpsState.prevDist = gpsState.dist; | |
| if (gps.altitude.meters() > gpsState.altMax) { | |
| gpsState.altMax = gps.altitude.meters(); | |
| } | |
| if (gps.speed.kmph() > gpsState.spdMax) { | |
| gpsState.spdMax = gps.speed.kmph(); | |
| } | |
| if (gps.altitude.meters() < gpsState.altMin) { | |
| gpsState.altMin = gps.altitude.meters(); | |
| } | |
| } | |
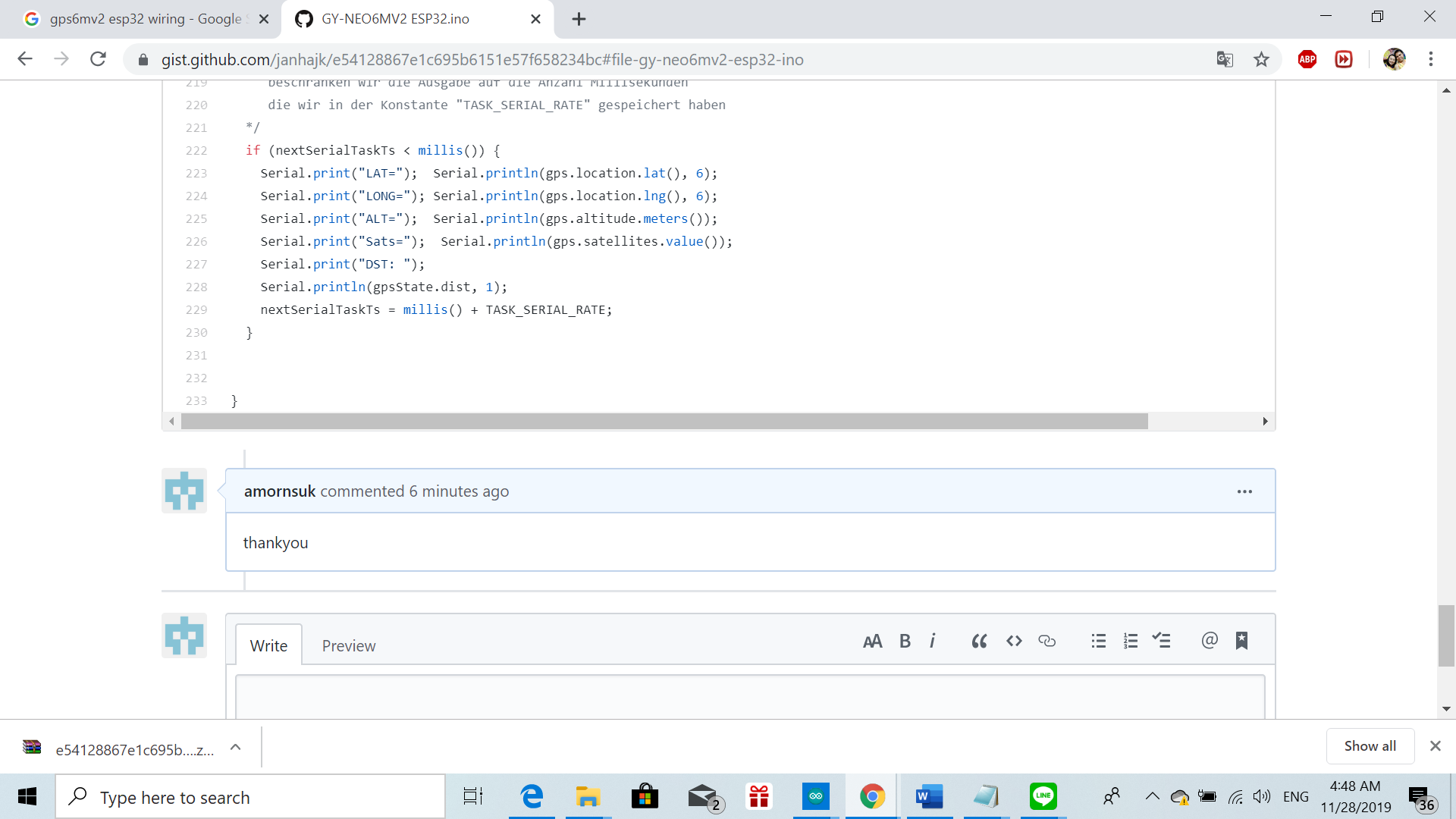
| /* | |
| Damit nicht zu viele Daten im Serial Monitor ausgegeben werden, | |
| beschränken wir die Ausgabe auf die Anzahl Millisekunden | |
| die wir in der Konstante "TASK_SERIAL_RATE" gespeichert haben | |
| */ | |
| if (nextSerialTaskTs < millis()) { | |
| Serial.print("LAT="); Serial.println(gps.location.lat(), 6); | |
| Serial.print("LONG="); Serial.println(gps.location.lng(), 6); | |
| Serial.print("ALT="); Serial.println(gps.altitude.meters()); | |
| Serial.print("Sats="); Serial.println(gps.satellites.value()); | |
| Serial.print("DST: "); | |
| Serial.println(gpsState.dist, 1); | |
| nextSerialTaskTs = millis() + TASK_SERIAL_RATE; | |
| } | |
| } |
This comment has been minimized.
This comment has been minimized.
amornsuk
commented
Nov 27, 2019
|
|
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
This comment has been minimized.
amornsuk commentedNov 27, 2019
thankyou